
Banc de test de palmes
Le Robot-Palm est un banc de test permettant de mesurer la poussée, la puissance et l’efficience d’une palme en conditions immergées. Il simule le mouvement de palmage pour comparer objectivement les performances et accompagner la conception produit.
- Mesure de la poussée et de la puissance
- Calcul de l’efficience de la palme
- Simulation réaliste du palmage humain
- Aide à la comparaison et à la conception produit
Produits testés
Secteur d’activités
Fonctionnalités
Le banc de test de palmes est un robot de palmage permettant de mouvoir une palme immergée dans un plan vertical et de mesurer simultanément :
- la puissance fournie à la palme (force × vitesse),
- la force de poussée générée dans l’axe d’avancement.
Ces mesures permettent de calculer :
- un indicateur d’efficience (rapport puissance fournie / force de poussée),
- une courbe d’accélération d’un plongeur type,
- la durée d’accès à une vitesse de croisière.
Le système permet ainsi de comparer objectivement différentes palmes et d’aider à la conception produit.
Principe de fonctionnement
Le robot monopalme est constitué :
- de 2 actionneurs linéaires asservis, pilotés numériquement,
- d’un châssis instrumenté mesurant la force de poussée,
- d’un système de mesure de la vitesse de l’eau (option dynamique),
- d’une armoire électrique et d’un PC de commande.
Les deux actionneurs interpolent leurs mouvements pour générer une infinité de cinématiques de palmage dans un champ défini.
Une “jambe” et un “pied” amovible permettent de chausser la palme à tester.
Le système mesure en permanence :
- la position,
- la vitesse,
- la force appliquée,
- la poussée horizontale générée.
Applications
- Qualification produit
- Comparaison de gammes (snorkeling, scuba, chasse)
- Aide à la conception
- Validation d’homothétie taille / poids utilisateur
- Discrimination objective de performances perçues en usage
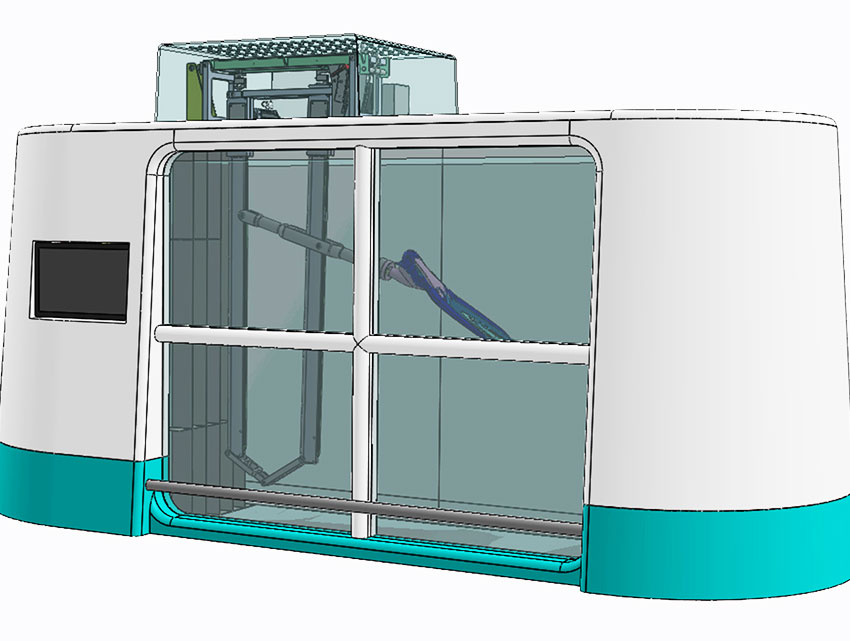
CAO du robot palmeur
CAO du robot palmeur

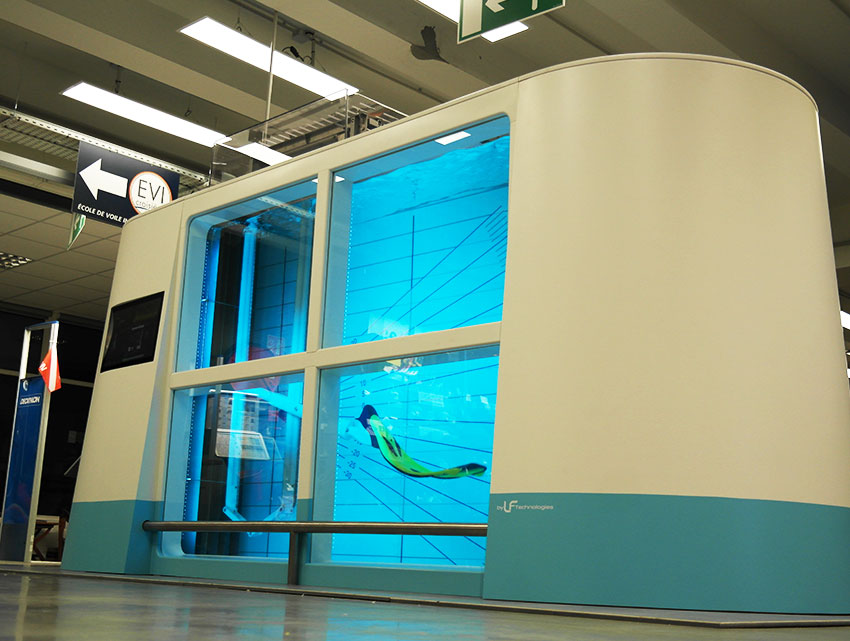
Nouveau design de l’habillage du robot palmeur
Nouveau design de l’habillage du robot palmeur
Banc d’endurances pour les palmes
Banc d’endurances pour les palmes
Nouveau design de l’habillage du robot palmeur
Nouveau design de l’habillage du robot palmeur

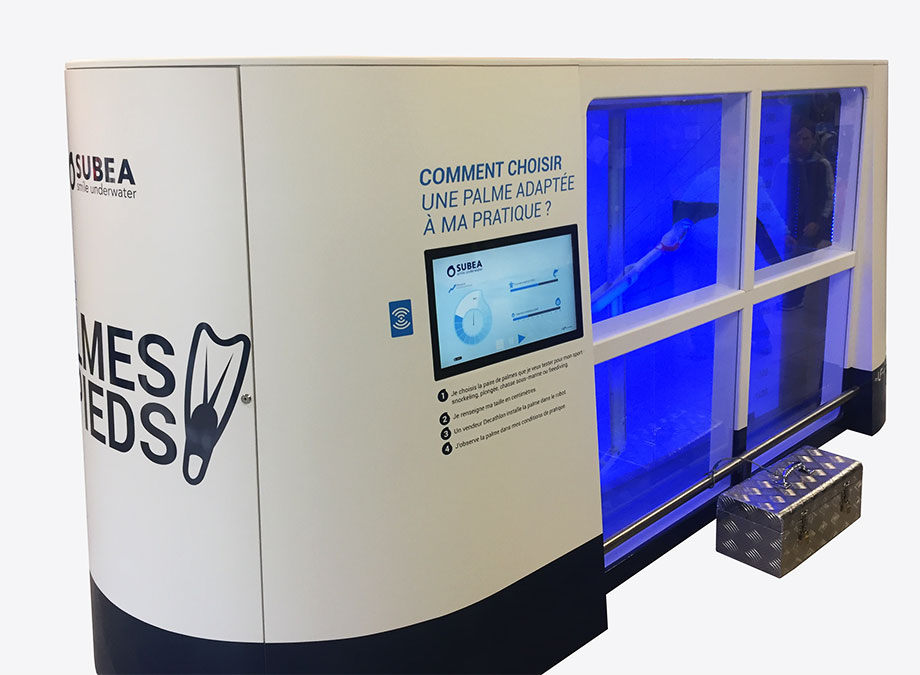
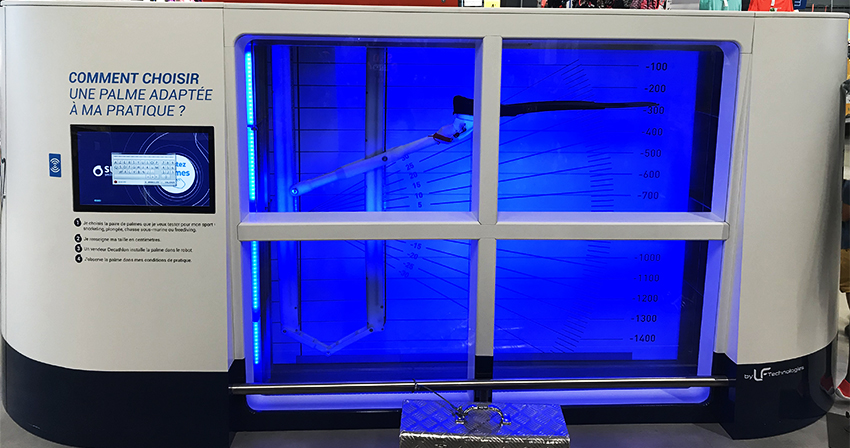
Banc de test pour palm placé en magasin
Banc de test pour palm placé en magasin
banc-d’endurance-de-palme-nouveau-design-en-magasin
banc-d'endurance-de-palme-nouveau-design-en-magasin
Ecran de sélection des palmes
Ecran de sélection des palmes
CARACTÉRISTIQUES TECHNIQUES du Robot de palmage – mesure d’efficience et d’accélération
Spécification | Robot-Palm |
Fréquence max. | 1 Hz |
Fréquence max. | ±45° |
Course actionneurs | ≈ 1 000 mm |
Vitesse actionneurs | 1 m/s |
Précision force poussée | ±0,1 N |
Précision puissance | ±0,01 W |
Vitesse eau (bassin dynamique) | ≈ 3 m/s |
Alimentation | 230 V monophasé |
Avantages du Robot-Palm –
Robot de palmage – mesure d’efficience et d’accélération
- Mesures comparatives et objectives
- Simulation réaliste d’un palmage humain
- Calcul de la durée d’accélération
- Fonctionnement en monopalme
Mesures comparatives et objectives
Force de poussée, puissance transmise, efficience.
Simulation réaliste d’un palmage humain
Amplitude, fréquence, profondeur, limitation de puissance
Calcul de la durée d’accélération
Jusqu’à la vitesse de croisière d’un plongeur type
Fonctionnement en monopalme
Mesures extrapolables en bipalme
présentation robot palmeur Subéa
Applications dans le secteur de l’équipement sportifs
Vous souhaitez en savoir plus sur les machines spéciales ?
Découvrez ici tout ce que vous devez savoir et bien plus encore !

Machine de traction compression monocolonne
Test de traction / compression à faible force pouvant aller jusqu’à l’arrachement sur des pièces de petites tailles.

Banc de choc pour cadre de raquette
Test de résistance au choc de cadres de raquette. Puits de chute vertical pour tester la déformation du cadre suite à l’impact. Percuteur de la forme d’une balle de tennis pour mesures réalistes.

Banc de fatigue pour balles
Pupitre de pilotage de vérin permettant, une fois intégré à un dispositif de fatigue, de tester en fatigue des matériaux ou produits.
MODULES COMPLÉMENTAIRES
Explorez nos modules complémentaires pour tirer le meilleur parti de machine spéciale !
Découvrez des solutions innovantes pour enrichir encore davantage votre expérience et optimiser vos résultats.









